ROBeurre Demi-Sel


Born in September 2024, this robot participates in the "Rescue Maze" category of the Robocup Junior contest.
In this contest, the robot must, without any help, find its path through a whole maze.
In this maze, there are "victims" that our robot must "rescue". These victims are marked by colours or letters on walls.
When the robot detects a victim, it must deposit the corresponding number of "rescue kits" next to it. The robot must indeed carry a kit distributor.
The group is composed of four girls:
- Noémie, captain, lead programming, wiring and 3D modeling
- Yuna P, camera model programmer
- Yuna D, 3D modeler
- Paula, soldering champion
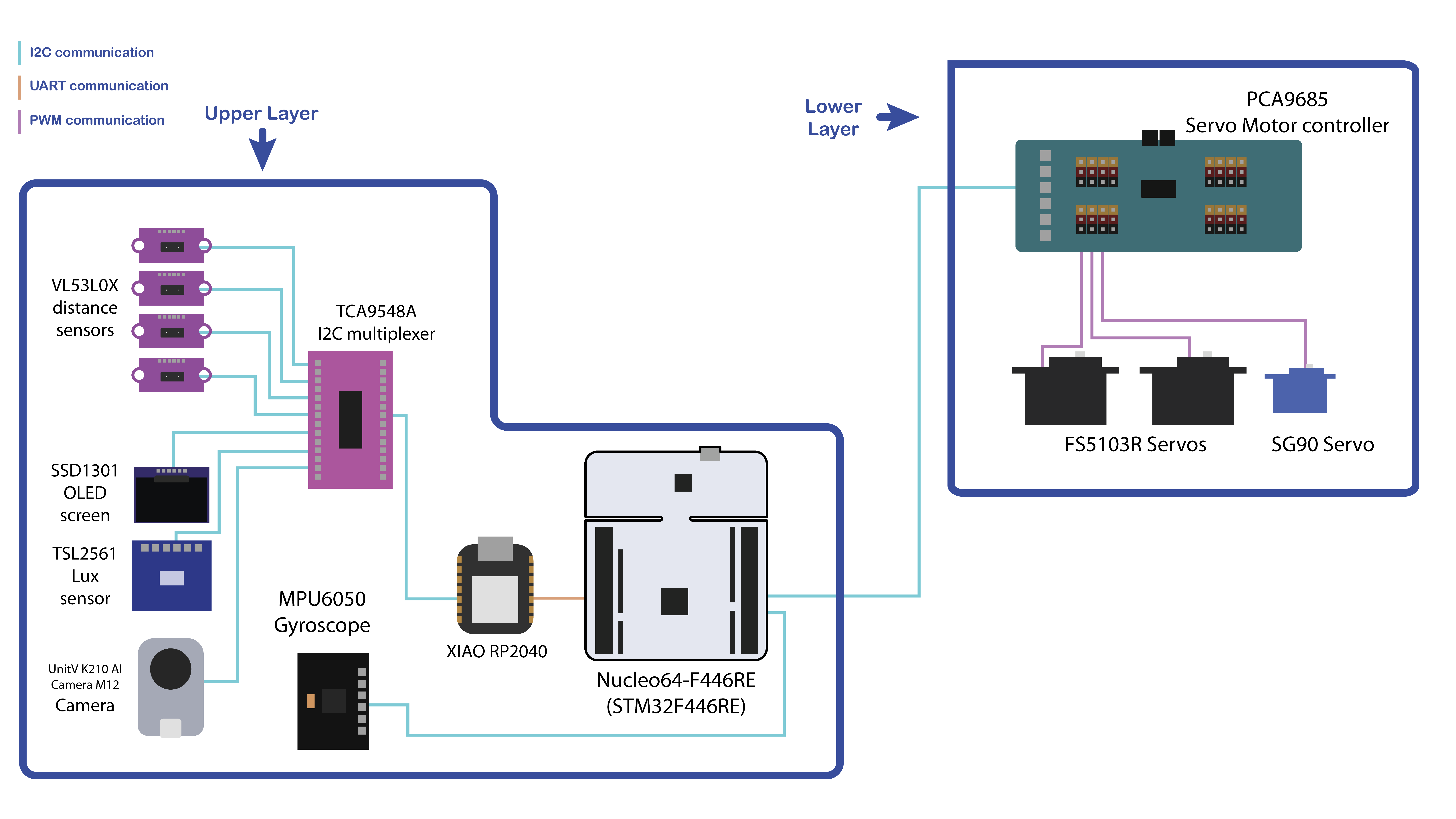
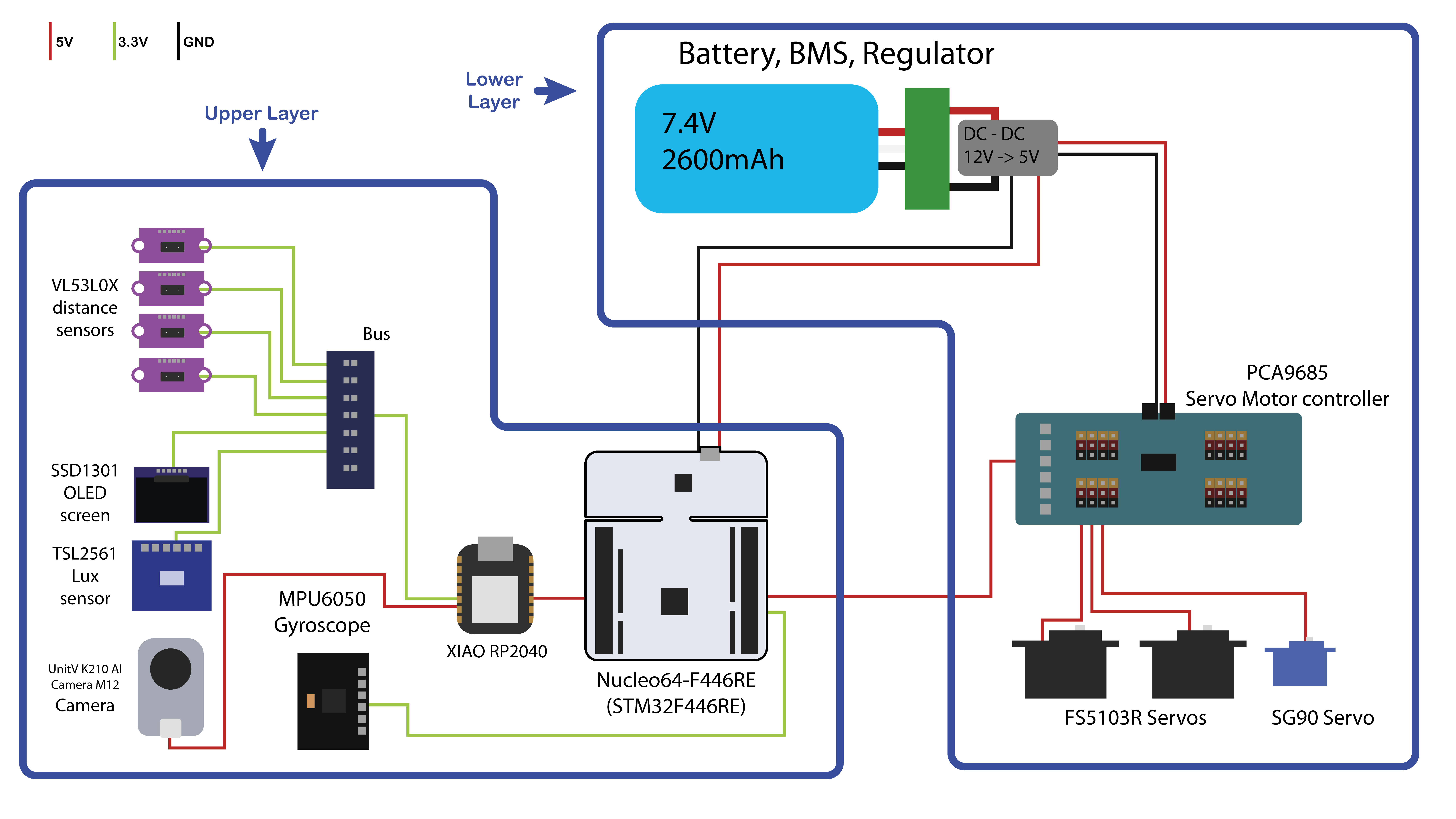
We use a Nucleo64-F446RE as a main MCU, and a XIAO RP2040 to process sensor data.
The robot can drive and detect walls, obstacles and tile colours. It can recognize victims and distribute the appropriate number of rescue kits.
The robot is divided into two separable layers: upper, with sensors and MCUs, and lower, with motors and batteries.
We already did this competition in 2023 with a much simpler robot, please refer to Sweet Bubble Tea'm for more informations!
This robot find its way through the maze thanks to its Time of Flight sensors which indicate whether the robot is next to a wall or not.
The robot uses the wall follower algorithm which states that, to find the exit of a maze, we have to follow a wall continuously.
So, this robot actually follows the wall to its left. If there's no wall to its left, it turns to the left until there's one. If there's one wall to the left and in front of it, it turns to the right.
The robot has a camera that detects the wall's color thanks to a model we coded ourselves. If the wall is green, it ignores it. If it's yellow or red, it deposits one "rescue kit".
It must also read letters on walls. We are still setting this up. The camera can be trained to also recognize different letters.
If the letter is a U, it ignores it. If it's a S, it deposits one "rescue kit". If it's a H, it deposits three kits.
-> The robot's letter detection is made by a python script using "OCR" (Optical Character Recognition).
Finally, the robot has a light sensor under it, as it must avoid black tiles and pause for 5 seconds on blue tiles. Each color will reflect light differently.